西門(mén)子6RA70調(diào)速器主從控制的應(yīng)用
發(fā)布時(shí)間:2019-08-02 16:19:40來(lái)源:
西門(mén)子6RA70調(diào)速器主從控制的應(yīng)用
摘 要 6RA70 主從控制的應(yīng)用
關(guān)鍵詞 peer-to-peer 通訊 主從控制 轉(zhuǎn)矩限幅
Key Words peer-to-peer communication master-slave control
torque limit
一. peer-to-peer 通訊
首先,介紹以下peer-to-peer 通訊:根據(jù)不同的應(yīng)用形式分為三類(lèi):以X172 接口為例:
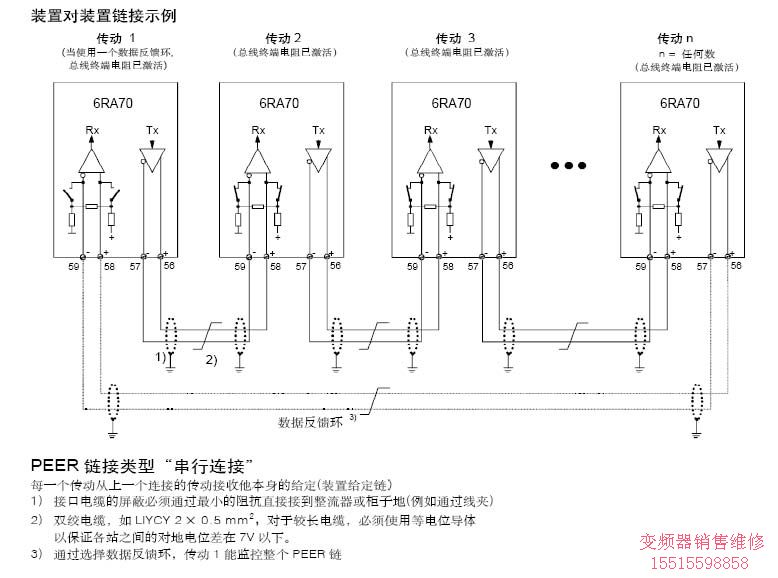
1. 串行連接
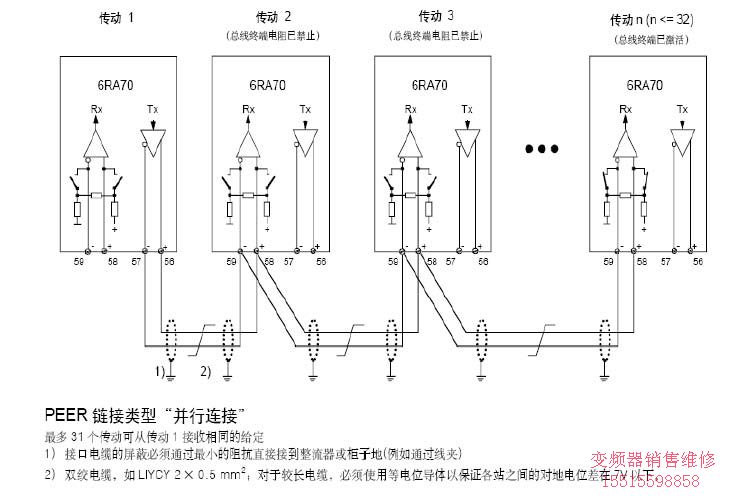
2.并行連接
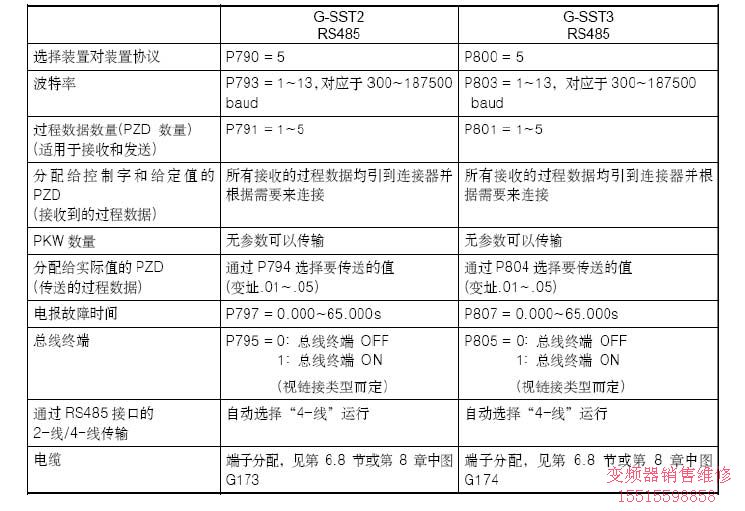
4.參數(shù)設(shè)置:
二. 實(shí)際生產(chǎn)應(yīng)用中,主從控制方式應(yīng)用分兩種形式:
1. 電機(jī)首尾通過(guò)法蘭直接硬相連,主動(dòng)裝置工作在速度環(huán)工作狀態(tài),而從動(dòng)裝置工作在電
流環(huán)(轉(zhuǎn)矩環(huán))狀態(tài),在這種方式中,一般情況下,定義遠(yuǎn)離減速機(jī)的電機(jī)作為主動(dòng)電機(jī),編碼
器接在主動(dòng)裝置所帶的電機(jī)上。
從動(dòng)裝置通過(guò)peer-to-peer 網(wǎng)絡(luò)接收來(lái)自主動(dòng)裝置發(fā)送來(lái)的電流(轉(zhuǎn)矩)給定,速度實(shí)際值
和控制字1。
連接簡(jiǎn)圖1:
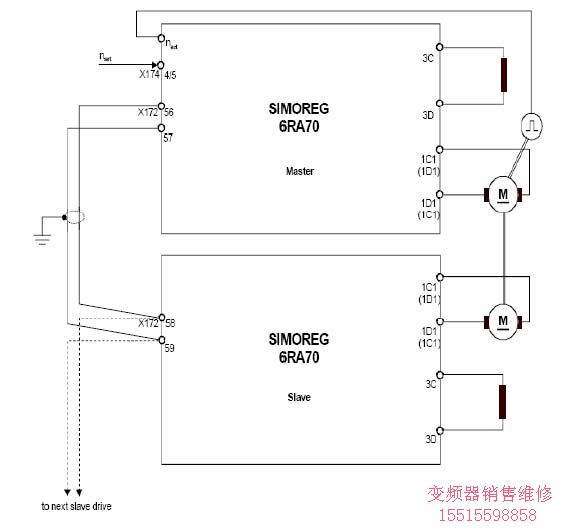
上圖是電機(jī)硬軸直接連接的主從控制的控制方式連接簡(jiǎn)圖,主電路連接請(qǐng)參考6RA70 手
冊(cè)。這種方式中,主動(dòng)裝置工作在速度環(huán)狀態(tài),產(chǎn)生轉(zhuǎn)矩設(shè)定值,把這個(gè)值通過(guò)peer-to -
peer 網(wǎng)絡(luò)傳遞給從動(dòng)裝置,同時(shí),把控制字1 也傳到從動(dòng)裝置,使得主,從動(dòng)裝置起停操作
同時(shí)進(jìn)行。這時(shí)候,從動(dòng)裝置上的端子 34 ,37, 38 要短接在一起。實(shí)際速度傳到從動(dòng)裝置,
主要是為了標(biāo)定勵(lì)磁曲線(xiàn)。此時(shí),從動(dòng)裝置的斜坡函數(shù)發(fā)生器和速度調(diào)節(jié)器不處于激活狀
態(tài)。通過(guò)這種連接,從動(dòng)裝置與主動(dòng)裝置能一起向前和向后運(yùn)行。
根據(jù)生產(chǎn)工藝要求, 在一些場(chǎng)合, 工作負(fù)載量很小,只需一個(gè)電機(jī)工作就可以,此時(shí),
需把從動(dòng)裝置上的端子34 ,37 和38 要用一個(gè)開(kāi)關(guān)使其使能取消,同時(shí)P082 不能設(shè)置成
3 , 或把從動(dòng)裝置主電源斷掉。
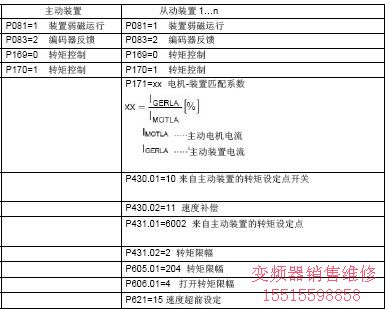
參數(shù)設(shè)置:
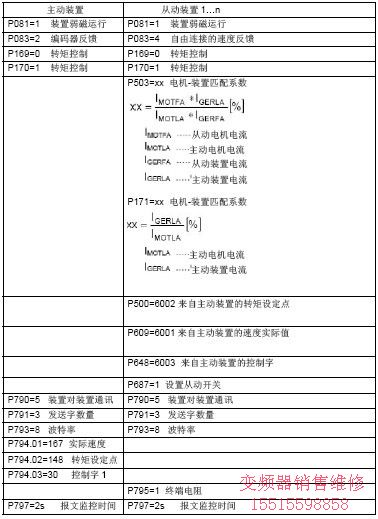
以上參數(shù)只是關(guān)于主從控制方面的設(shè)置,關(guān)于啟動(dòng)參見(jiàn)6RA70 手冊(cè)的第7.5 節(jié)的啟動(dòng)
步驟.。
關(guān)于優(yōu)化運(yùn)行步驟:
(1) 主動(dòng)裝置的優(yōu)化運(yùn)行
a.打開(kāi)電機(jī)和減速機(jī)之間的連接,
b.在從動(dòng)裝置上設(shè)定P171=0 P172 =0
c.執(zhí)行P051=25 優(yōu)化
d.執(zhí)行P051=26 優(yōu)化,必要時(shí),進(jìn)行手動(dòng)優(yōu)化,達(dá)到使輸出轉(zhuǎn)速平穩(wěn),為弱磁優(yōu)化做準(zhǔn)備
e.執(zhí)行P051=27 優(yōu)化
f. 在從動(dòng)裝置上恢復(fù)P171 ,P172 的值
(2).從動(dòng)裝置的優(yōu)化運(yùn)行
a.把主動(dòng)裝置的P171, P172 設(shè)置成0
b.執(zhí)行P051=25 優(yōu)化
c.執(zhí)行P051=27 優(yōu)化
d.把主動(dòng)裝置的P171 P172 恢復(fù)成原來(lái)的值
(3)當(dāng)把電機(jī)與減速機(jī)連接以后,要設(shè)置P051=26 優(yōu)化運(yùn)行,調(diào)整轉(zhuǎn)速達(dá)到平穩(wěn)。
2. 第二種情況是應(yīng)用于類(lèi)似印刷行業(yè),與第一種情況基本相同,在這種情況下,電機(jī)軸的
連接可以自由分開(kāi)。根據(jù)電機(jī)連接軸的連接方式分為下列兩種情況:
見(jiàn)下列簡(jiǎn)圖2:
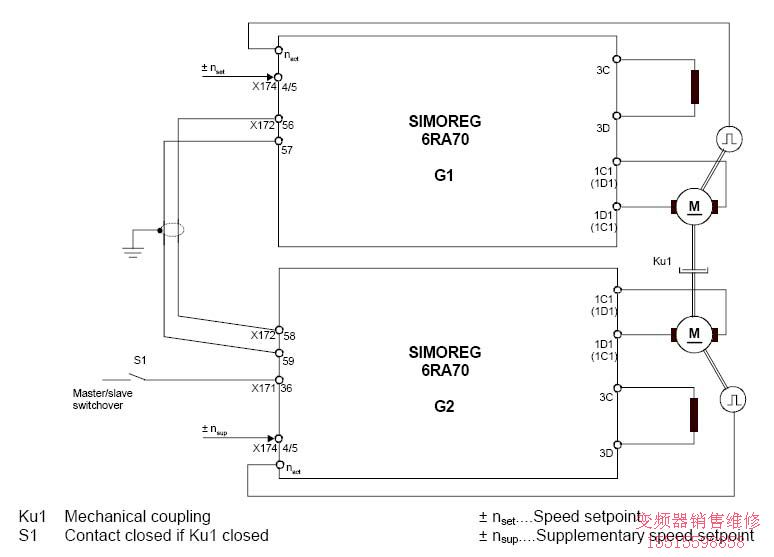
控制模式1
1. 電機(jī)軸連接在一起即,Ku1 閉合
圖中G1 為主動(dòng)裝置,運(yùn)行在速度環(huán)狀態(tài),,G2 為從動(dòng)裝置,運(yùn)行于電流環(huán)控制,給定值通
過(guò)peer-to-peer 接收主動(dòng)裝置的轉(zhuǎn)矩給定或電流給定。在這種情況下,電機(jī)軸連接Ku1 必須
牢固閉合,否則,可能由于失去速度環(huán)的控制而產(chǎn)生超速現(xiàn)象。
2. 當(dāng)電機(jī)軸分開(kāi)運(yùn)行時(shí),即Ku1脫開(kāi)
此時(shí),主動(dòng)裝置G1 與從動(dòng)裝置G2 獨(dú)立工作于速度環(huán)控制模式, G1 的速度給定通過(guò)
模擬量(或網(wǎng)絡(luò)),G2 的速度給定通過(guò)peer-to-peer,把G1 的斜坡發(fā)生器的輸出給到G2
的速度環(huán)的給定,同時(shí),把G2 的模擬量作為G2 的速度補(bǔ)償量,從而達(dá)到G1 和G2 的
同步。
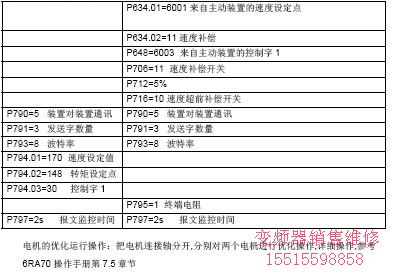
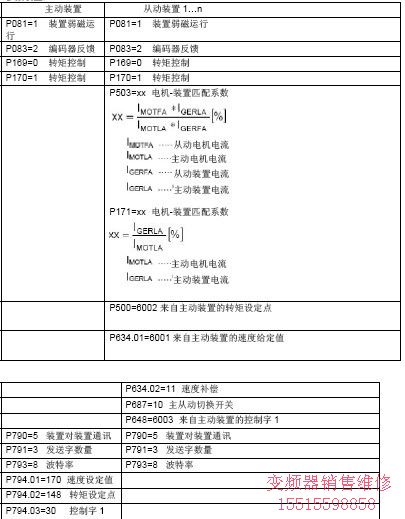
參數(shù)設(shè)置:

電機(jī)的優(yōu)化運(yùn)行操作:
把電機(jī)連接軸分開(kāi),分別對(duì)兩個(gè)電機(jī)進(jìn)行優(yōu)化操作,詳細(xì)操作,參考6RA70 操作手冊(cè)第7.5
章節(jié)。
控制模式2
當(dāng)兩電機(jī)軸Ku1 牢固連接時(shí),主動(dòng)裝置G1 和從動(dòng)裝置G2 都工作于速度環(huán)控制,
G2 的速度給定同樣來(lái)自G1 的斜坡函數(shù)發(fā)生器的輸出,但同時(shí),要通過(guò)G2 的速度補(bǔ)償
給定使G2 的速度超前于G1 裝置5%,使得G2 的速度環(huán)逐漸趨于飽和。把G1 的速度
調(diào)節(jié)器的輸出通過(guò)peer-to-peer 傳送到G2 作為轉(zhuǎn)矩限幅,使得G2 和G1 的輸出轉(zhuǎn)矩
相等。如果突然電機(jī)連接軸脫開(kāi),G2 的速度只能增加5% 。此時(shí)由于G2 的速度環(huán)退出
飽和狀態(tài)而按照大于G1 的給定的5%運(yùn)行,不致于超速飛車(chē)。
參數(shù)設(shè)置情況: